








News















Motor Kawat Datar vs Motor Jepit Rambut: Apa Bedanya & Mana yang Lebih Baik untuk Kendaraan Listrik?


















Mengapa PMSM Digunakan pada Kendaraan Listrik? Panduan Definitif Motor Sinkron Magnet Permanen di EV









Daya di belakang kendaraan listrik: Menjelajahi Sistem Kontrol EV dan Unit Kontrol Kendaraan (VCU)
Kendaraan listrik (EV) dengan cepat berubah dari konsep futuristik menjadi gerakan global. Sementara paket baterai dan motor listrik mendapatkan sebagian besar perhatian, yang benar -benar menghidupkan EV adalah sistem kontrol EV yang canggih - orkestrasi elektronik yang kompleks, perangkat lunak tertanam, dan kecerdasan. Di jantung sistem ini adalah pengontrol mobil EV, lebih sering disebut sebagai unit kontrol kendaraan (VCU). Di blog ini, kami mengeksplorasi struktur, fungsi, inovasi, dan masa depan sistem kontrol EV dan VCU.
Pengantar Teknologi Kontrol EV
Kontrol Kendaraan ListrikTeknologi mengatur bagaimana energi dikelola, bagaimana mobil merespons input pengemudi, dan bagaimana semua komponen berkomunikasi secara real time. Dari mengatur penggunaan baterai hingga menyinkronkan torsi motor, sistem kontrol EV memainkan peran penting dalam keselamatan kendaraan, efisiensi, dan pengalaman berkendara.
Pergeseran dari mesin pembakaran internal ke motor listrik membutuhkan serangkaian mekanisme kontrol yang sama sekali baru. Tidak seperti mobil tradisional, yang sangat bergantung pada komponen mekanis, EV bergantung pada kontrol elektronik presisi dan perangkat lunak untuk beroperasi. Pergeseran paradigma ini membuat pengontrol mobil EV penting untuk fungsionalitas kendaraan.

Komponen kunci dari sistem kontrol EV
Sistem kontrol EV terdiri dari beberapa modul terintegrasi yang bekerja bersama untuk mengendalikan setiap aspek operasi kendaraan. Komponen utama meliputi:
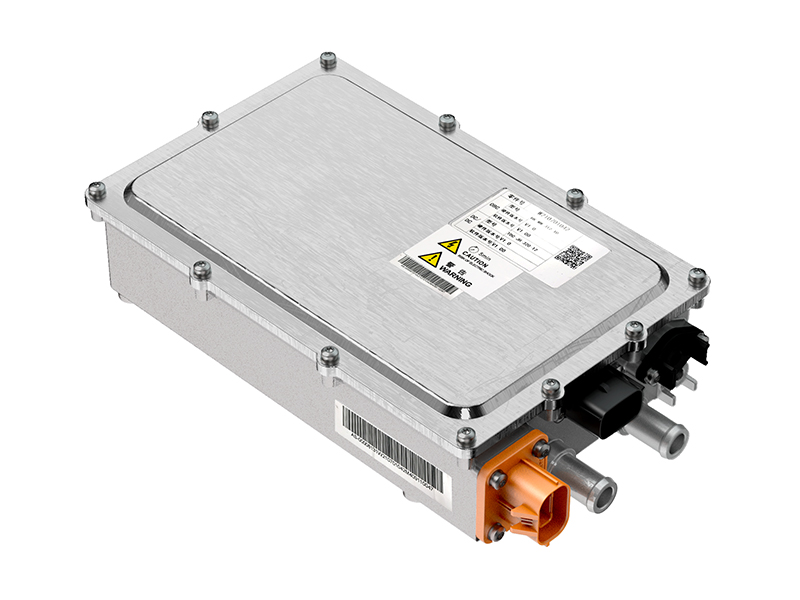
A. Unit Kontrol Kendaraan (VCU)
Otak pusat kendaraan yang mengoordinasikan semua subsistem, memproses data sensor, dan menjalankan strategi kontrol.
B. Unit Kontrol Motor (MCU)
Mengontrol operasi motor traksi, termasuk kecepatan, torsi, dan pengereman regeneratif.
C. Sistem Manajemen Baterai (BMS)
Mengelola paket baterai, termasuk pemantauan tegangan sel, kontrol suhu, dan estimasi canggih (SOC).
D. Unit Distribusi Daya (PDU)
Mengatur distribusi daya dari baterai ke berbagai komponen.
e. Onboard Charger (OBC)
Mengelola proses pengisian baterai saat dicolokkan ke sumber eksternal.
F. Human-Machine Interface (HMI)
Menghubungkan sistem kendaraan dengan pengemudi, biasanya melalui tampilan dasbor dan panel kontrol.
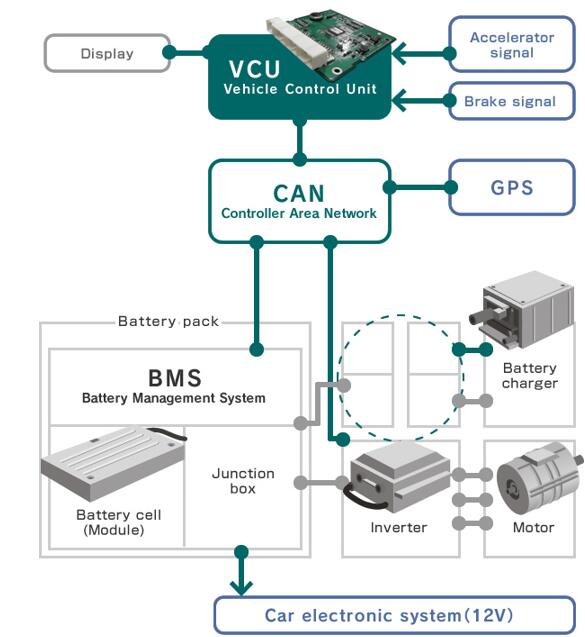
Setiap komponen berkomunikasi dengan VCU melalui jaringan komunikasi di seluruh kendaraan, biasanya menggunakan protokol CAN (Controller Area Network).
Memahami Unit Kontrol Kendaraan (VCU)
Unit kontrol kendaraan bertindak sebagai pengontrol utama EV. Ia menerima data dari sensor dan ECU lainnya (unit kontrol elektronik) dan memprosesnya untuk membuat keputusan real-time. Fungsi utama meliputi:
- Perhitungan Permintaan Torsi
- Manajemen energi
- Kontrol mode drive
- Koordinasi Pengereman Regeneratif
- Pemantauan Keselamatan dan Diagnostik
- Komunikasi dengan sistem cloud atau telematika
Berbeda dengan unit kontrol engine (ECU) pada kendaraan konvensional, VCU dalam EV harus berurusan dengan nuansa propulsi listrik, manajemen termal, dan optimasi penggunaan baterai.
Bagaimana cara kerja pengontrol mobil EV
Pengontrol mobil EV beroperasi melalui perangkat lunak tertanam yang diprogram ke dalam VCU. Begini cara fungsinya:
Langkah 1: Koleksi Input
Sensor menyediakan data tentang kecepatan kendaraan, posisi pedal, kondisi baterai, suhu motor, dan banyak lagi.
Langkah 2: Pemrosesan Sinyal
VCU menganalisis sinyal-sinyal ini dan membandingkannya dengan ambang operasional atau perintah driver yang telah ditentukan sebelumnya.
Langkah 3: Pengambilan Keputusan
Berdasarkan input, VCU menentukan berapa banyak daya yang harus diberikan motor atau berapa banyak pengereman regeneratif yang dibutuhkan.
Langkah 4: Distribusi Perintah
Perintah dikirim ke unit kontrol motor, sistem manajemen baterai, dan komponen lain untuk menjalankan tindakan yang diperlukan.
Langkah 5: Umpan Balik dan Penyesuaian
VCU terus memantau umpan balik sistem dan membuat penyesuaian waktu nyata untuk kinerja optimal.
Proses kontrol loop tertutup ini memungkinkan EV untuk menawarkan akselerasi yang lancar, pengereman yang tepat, dan efisiensi energi yang tinggi.
Desain dan Arsitektur Sistem Kontrol EV
Merancang sistem kontrol EV membutuhkan perpaduan rekayasa perangkat keras dan perangkat lunak. Arsitektur sistem biasanya didistribusikan, dengan beberapa ECU yang saling berhubungan melalui bus komunikasi berkecepatan tinggi. Struktur khas meliputi:
- VCU Tengah: Unit Pengambilan Keputusan Inti
- ECU Terdesentralisasi: Untuk traksi, baterai, iklim, dan kontrol infotainment
- Array Sensor: Sensor Kecepatan Roda, Sensor Suhu, Accelerometer, dll.
- Jaringan Komunikasi: Biasanya Can-FD, Lin, atau Flexray
- Catu daya yang berlebihan: untuk memastikan toleransi kesalahan
Perangkat lunak dikembangkan menggunakan alat desain berbasis model seperti Matlab/Simulink dan mengikuti standar seperti Autosar dan ISO 26262 untuk fungsi kritis keselamatan.

Integrasi dan komunikasi dalam sistem EV
Integrasi adalah salah satu aspek paling menantang dari sistem kontrol EV. Ini melibatkan kedua integrasi perangkat keras - menghubungkan modul fisik - dan integrasi perangkat lunak - memastikan ECU yang berbeda dapat berbagi dan memproses data secara efektif.
Protokol komunikasi
- Can Bus: banyak digunakan untuk komunikasi real-time yang kuat.
- Lin Bus: Biasanya digunakan untuk aplikasi berkecepatan rendah.
- Ethernet: Semakin banyak digunakan untuk aplikasi data tinggi seperti ADAS.
- Pembaruan Over-the-Air (OTA): Izinkan VCU untuk menerima perbaikan perangkat lunak dari jarak jauh.
Integrasi fungsional
Semua sistem - dari baterai hingga rem - harus beroperasi secara harmonis. VCU memastikan operasi yang terkoordinasi, misalnya, menyinkronkan pengereman regeneratif dengan rem gesekan atau menyesuaikan output HVAC berdasarkan suhu baterai.
Fitur dan Inovasi Lanjutan dalam Teknologi VCU
VCU modern berkembang untuk mendukung tidak hanya kontrol kendaraan tetapi juga konektivitas, otomatisasi, dan integrasi AI. Inovasi meliputi:
A. Algoritma kontrol berbasis AI
Model pembelajaran mesin mengoptimalkan penggunaan daya, perencanaan rute, dan pemeliharaan prediktif.
B. Diagnostik yang terhubung dengan cloud
Transmisi data waktu-nyata memungkinkan diagnostik jarak jauh dan pembaruan firmware.
C. Vektor torsi
VCU dapat mengontrol torsi roda individu untuk penanganan dan keamanan yang lebih baik.
D. Integrasi dengan ADAS
Sistem bantuan pengemudi lanjutan seperti Adaptive Cruise Control dan Lane-Feeping Assist sekarang berkomunikasi dengan VCU untuk meningkatkan dinamika mengemudi.
e. Platform VCU modular
Perusahaan bergerak menuju VCU modular yang dapat disesuaikan per platform kendaraan, mengurangi waktu dan biaya pengembangan.
Tantangan dalam Desain Sistem Kontrol EV
Terlepas dari kemajuan teknologi, mengembangkan sistem kontrol EV yang kuat menghadirkan tantangan yang signifikan:
A. Keselamatan dan redundansi
Fungsi kritis-keselamatan harus beroperasi dengan andal dalam semua kondisi. Mencapai kepatuhan ISO 26262 membutuhkan validasi dan redundansi yang ketat.
B. Manajemen termal
Pengontrol EV harus mengelola panas yang dihasilkan oleh elektronik daya, terutama selama pengisian cepat dan mengemudi dengan beban tinggi.
C. Kompleksitas perangkat lunak
VCU berisi jutaan baris kode. Memastikan keamanan, efisiensi, dan operasi bebas bug adalah tugas teknik utama.
D. Overhead integrasi
Mengintegrasikan komponen baru atau fitur perangkat lunak tanpa mengganggu fungsi yang ada adalah kompleks.
e. Kendala real-time
Sistem kontrol EV harus beroperasi secara real-time dengan latensi rendah untuk memastikan keamanan dan responsif pengemudi.
Tren masa depan dalam pengontrol EV dan pengembangan VCU
Saat teknologi EV matang, masa depan pengontrol mobil EV dan VCU menuju ke arah sistem yang lebih pintar, lebih adaptif, dan lebih terhubung.
A. Pengontrol domain dan zonal
Alih -alih banyak ECU, arsitektur masa depan akan mengkonsolidasikan kontrol menjadi pengontrol zona untuk mengurangi kabel dan peningkatan efisiensi.
B. Komputasi terpusat
OEM bergerak menuju platform komputasi kendaraan terpusat yang dapat menangani semuanya, mulai dari powertrain hingga infotainment.
C. AI dan kontrol prediktif
VCU akan menggunakan AI untuk manajemen energi prediktif, belajar kebiasaan driver untuk mengoptimalkan kinerja dan masa pakai baterai.
D. Fokus keamanan siber
Dengan peningkatan konektivitas, mengamankan sistem kontrol EV dari ancaman cyber adalah prioritas utama.
e. Komunikasi V2X
Komunikasi kendaraan-ke-semuanya (V2X) akan memungkinkan mobil untuk berbagi data dengan infrastruktur, meningkatkan keamanan dan arus lalu lintas.
Kesimpulan
Karena revolusi kendaraan listrik terus mendapatkan momentum, pentingnya sistem kontrol EV yang direkayasa dengan baik tidak dapat dilebih-lebihkan. Di tengah -tengah keajaiban teknologi ini terletak pengontrol mobil EV, atau unit kontrol kendaraan, bertindak sebagai otak di belakang mesin. Dari mengelola aliran daya hingga memastikan pengalaman berkendara yang mulus, VCU adalah kekuatan sunyi yang memberi daya pada usia listrik.
Kemajuan di masa depan dalam AI, konektivitas, dan arsitektur terpusat hanya akan meningkatkan kemampuan sistem ini, memungkinkan kendaraan listrik yang lebih cerdas, lebih aman, dan lebih efisien. Ketika para insinyur dan pembuat mobil terus mendorong batas, satu hal yang jelas: daya di belakang kendaraan listrik tidak hanya berada di baterai, tetapi pada intelijen yang mengendalikannya.