








News














Motor Kawat Datar vs Motor Jepit Rambut: Apa Bedanya & Mana yang Lebih Baik untuk Kendaraan Listrik?
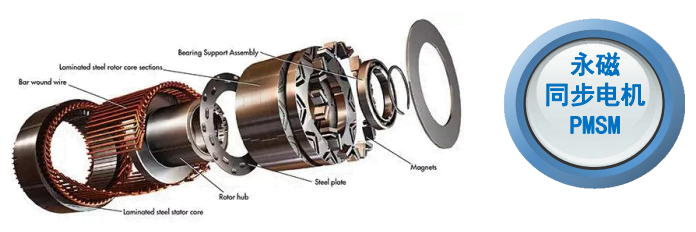


















Mengapa PMSM Digunakan pada Kendaraan Listrik? Panduan Definitif Motor Sinkron Magnet Permanen di EV









Bagaimana cara membaca parameter motor sinkron magnet permanen?
Bagaimana cara membaca parameter motor sinkron magnet permanen?
MemahamiParameter motor sinkron magnet permanen (PMSM)adalah dasar dari seleksi, aplikasi, kontrol dan diagnosis kesalahan.
Parameter ini biasanya dibagi menjadi dua kategori:
Parameter pelat/parameter kinerja dasar: Ini biasanya ditandai secara langsung pada pelat motor atau di tabel spesifikasi kinerja manual produk, yang paling sering ditemui oleh pengguna.
Parameter Desain/Parameter Sirkuit Setara: Parameter ini sangat penting untuk analisis mendalam, kontrol yang tepat dan pemodelan simulasi motor. Mereka biasanya ditemukan dalam lampiran teknis manual produk, dokumen desain, atau memerlukan pengujian untuk mendapatkan
Berikut ini menjelaskan kedua jenis parameter ini secara detail:
I. Parameter papan nama / parameter kinerja dasar
1. Power Rated:
Artinya: Daya mekanis yang dapat di -output motor secara terus menerus, aman dan andal dalam kondisi pengenal (tegangan pengenal, kecepatan pengenal, beban pengenal, kondisi pendinginan yang ditentukan, dll.). Unit biasanya kilowatt atau tenaga kuda.
Dilihat sebagai: Ini adalah parameter inti untuk memilih motor untuk memenuhi persyaratan beban. Pastikan daya kontinu maksimum yang dibutuhkan oleh beban kurang dari atau sama dengan daya pengenal motor. Perhatikan perbedaan antara daya pengenal dan daya puncak (kapasitas kelebihan jangka pendek)
2. Tegangan Dinilai:
Artinya: Nilai efektif tegangan garis yang ditentukan selama desain dan diterapkan pada belitan stator motor. Unit ini adalah Volt.
Untuk motor yang ditenagai oleh pengemudi, ini biasanya mengacu pada nilai setara dari tegangan bus DC inverter yang dikonversi ke sisi AC.
Cara melihat: Harus sesuai dengan kapasitas tegangan output driver. Tegangan yang terlalu tinggi akan merusak isolasi atau menyebabkan saturasi magnetik; Tegangan yang terlalu rendah tidak akan dapat menghasilkan daya dan torsi yang dinilai, degradasi kinerja.
3. Nilai saat ini:
Artinya: Nilai efektif input arus saluran stator dari catu daya ketika motor menghasilkan daya pengenal, kecepatan pengenal dan tegangan pengenal. Unit ini Ampere.
Cara Melihat: Digunakan untuk menghitung daya input, pilih kapasitas arus driver (arus pengemudi yang dinilai harus lebih besar dari arus pengenal motor), rancang saluran catu daya dan perangkat perlindungan kelebihan beban. Ini juga secara tidak langsung mencerminkan ukuran kehilangan tembaga.
Nilai Kecepatan:
Artinya: Kecepatan rotasi rotor motor pada tegangan pengenal, frekuensi pengenal dan daya output yang dinilai. Unit adalah revolusi per menit.
Perlu sesuai dengan persyaratan kecepatan beban. Bagaimana memahami apakah motor berjalan dengan kecepatan konstan atau tidak: perlu disesuaikan untuk berjalan dengan kecepatan. Perhatikan perbedaan antara kecepatan pengenal dan kecepatan maksimum (dibatasi oleh kekuatan mekanik dan kapasitas magnetik yang lemah)
5. Frekuensi Dinilai:
Artinya: Frekuensi catu daya ketika motor secara langsung ditenagai oleh catu daya sinusoidal (misalnya, jaringan). Untuk motor yang didorong oleh konverter frekuensi, parameter ini biasanya mengacu pada frekuensi output driver dengan kecepatan pengenal.
Cara melihat: Untuk aplikasi frekuensi daya, itu harus cocok dengan frekuensi grid (50Hz atau 60Hz). Untuk aplikasi frekuensi variabel, parameter ini secara langsung terkait dengan kecepatan pengenal (n = 60f /p, di mana p adalah jumlah kutub).
6. Torsi Dinilai:
Torsi mekanis yang dihasilkan oleh motor ketika menghasilkan daya pengenal pada kecepatan pengenal. Unit: N · m.
Rumusnya adalah: t = p/w, di mana p adalah daya pengenal (watt) dan w adalah kecepatan sudut pengenal (radian/kedua, w = 2πn/60, n adalah kecepatan pengenal dalam rpm). Ini adalah parameter inti yang diperlukan untuk mengatasi torsi resistansi nol beban. Perhatikan perbedaan antara torsi pengenal dan torsi puncak (kapasitas kelebihan jangka pendek).
7. Efisiensi:
Efisiensi pengenal motor didefinisikan sebagai rasio persentase daya mekanik output untuk input daya listrik (pin = √3 * V dinilai, di mana V adalah tegangan pengenal untuk sistem tiga fase). Rumus N = (p_out / p_in) × 100% menunjukkan kemampuannya untuk mengubah energi listrik menjadi daya mekanik. Efisiensi yang lebih tinggi mengurangi kerugian energi (termasuk kerugian tembaga, kehilangan zat besi, kerugian mekanis, dan kerugian kebocoran) sambil menurunkan biaya operasional. Perhatikan bahwa efisiensi yang ditampilkan pada papan nama motor biasanya hanya mencerminkan kondisi pengenal.
8. Faktor Daya:
Artinya: Rasio daya aktif input terhadap daya yang jelas (cosφ) dalam kondisi kerja yang dinilai. Ini mencerminkan hubungan fase antara bentuk gelombang arus dan tegangan dan tingkat distorsi saat ini.
Cara melihatnya: Faktor daya tinggi berarti tingkat pemanfaatan yang tinggi dari jaringan dan lebih sedikit "polusi" ke jaringan. PMSM biasanya memiliki faktor daya tinggi (mendekati 1) dalam kondisi terukur. Driver (inverter) itu sendiri juga mempengaruhi faktor daya pada sisi input.
9. Frekuensi:
Artinya: Jumlah total tiang magnet (tiang N dan S muncul berpasangan) dari medan magnet motor. Jumlah tiang biasanya ditunjukkan pada papan nama.
Melihat: Menentukan hubungan antara kecepatan sinkron motor dan frekuensi catu daya (N sinkronisasi = 60F/p). Lebih banyak kutub menghasilkan kecepatan sinkron yang lebih rendah tetapi berpotensi kepadatan torsi yang lebih tinggi. Parameter yang mempengaruhi algoritma kontrol (misalnya, bandwidth pengamat)
10. Kelas Insulasi:
Artinya: Suhu operasi maksimum dari bahan isolasi belitan motor ditentukan. Kelas umum adalah B (130 ° C), F (155 ° C), H (180 ° C).
Cara Melihat: Menentukan kenaikan suhu yang diijinkan dan kapasitas berlebih dari motor. Dalam lingkungan atau aplikasi suhu tinggi yang membutuhkan kelebihan beban tinggi, lebih aman dan lebih dapat diandalkan untuk memilih motor dengan tingkat isolasi yang lebih tinggi (misalnya F atau H).
11. Kelas Perlindungan:
Artinya: Kode IP menunjukkan kemampuan perumahan motor untuk mencegah materi asing yang solid (digit pertama) dan cairan (digit kedua) masuk. Misalnya, IP54 (kedap debu dan tahan air), IP65 (tahan debu dan tahan air), IP67 (tahan debu dan tahan perendaman jangka pendek).
Cara Melihat: Pilih sesuai dengan kondisi debu, kelembaban, dan kelembaban dari lingkungan pemasangan motor. Lingkungan luar ruangan, lembab dan berdebu membutuhkan kelas perlindungan tinggi (seperti IP65 atau lebih tinggi)
12. Mode Pendinginan:
Artinya: Jalan disipasi panas motor. Yang umum adalah I0 411 (pendingin kipas diri, disipasi panas permukaan), I0 416 (pendinginan udara paksa, kipas eksternal), I0 410 (pendingin alami, tanpa kipas), IC71W (pendingin air).
Cara Melihat: Ini mempengaruhi kepadatan daya dan kapasitas operasi motor yang berkelanjutan. Motor berkekuatan tinggi atau kompak sering menjadi pendingin udara atau pendingin air
Ii. Parameter Desain/Parameter Sirkuit Setara
Parameter ini biasanya digunakan untuk menetapkan model matematika motor (model sumbu DQ) untuk kontrol vektor, simulasi, optimasi efisiensi dan prediksi kinerja.
1. Resistensi Stator:
Artinya: Nilai resistansi dari setiap fase lilitan stator di bawah DC atau frekuensi rendah. Unit ini ohm. Biasanya mengacu pada resistensi fase.
Cara melihatnya: Ini mempengaruhi perhitungan kehilangan tembaga, pengaturan parameter kontrol loop saat ini dan estimasi kenaikan suhu. Itu secara signifikan dipengaruhi oleh suhu (meningkat dengan suhu)
Induktansi induktansi / sumbu-D-Axis: Induktansi sumbu Q:
Artinya: Parameter induktansi stator yang didefinisikan dalam sistem koordinat rotasi rotor (sumbu D dan sumbu Q). Sumbu D berada di sepanjang arah medan magnet magnet permanen, dan sumbu Q adalah sudut listrik 90 derajat di depan sumbu-A.
LD: Induktansi sumbu D. Karena adanya magnet permanen, keengganan magnetik sirkuit magnetik sumbu D adalah besar, dan LD biasanya kecil atau bahkan negatif (untuk PMSM tertanam)
Induktansi sumbu Q. Sirkuit magnetik Q-Axis terutama melewati core stator dan rotor, dengan resistensi magnetik rendah, dan LQ biasanya besar. La:
Parameter kunci menentukan: torsi elektromagnetik: t = (3/2) × p [ψ ± × lq + (ld-lq) × ld × lq] (di mana ψ ± mewakili hubungan fluks magnet permanen). Prinsip dasar PMSM menghasilkan torsi keengganan terletak pada LD = LQ (untuk IPMSM dengan rasio tiang yang menonjol tinggi). Kemampuan Magnetik Lemah: Nilai LD yang lebih kecil biasanya memungkinkan rentang operasi magnet lemah yang lebih luas dan kinerja berkecepatan tinggi yang unggul. Bandwidth loop saat ini dan desain pengontrol: Induktansi merupakan konstanta waktu primer dalam komponen inersia orde pertama loop saat ini. Bentuk gelombang dan amplitudo EMF elektromagnetik secara signifikan dipengaruhi oleh tingkat saturasi magnetik (terutama pada arus tinggi).
3. Fluks Magnet Permanen:
Artinya: Amplitudo dari tautan magnetik yang dihasilkan oleh magnet permanen dalam belitan stator. Unitnya adalah Weber. Biasanya mengacu pada tautan magnetik maksimum yang disebabkan oleh medan magnet permanen rotor dalam belitan stator.
Cara Melihat: Parameter Inti! Itu menentukan:
Konstanta EMF Kembali: ke = ψpm * w (di mana w adalah kecepatan sudut medan listrik). EMF belakang sebanding dengan kecepatan rotasi.
Konstanta Torsi: KT ≈ (3/2) * P * ψ ± (untuk SPMSM yang dipasang di permukaan, LD ≈ LQ). Torsi sebanding dengan arus sumbu Q.
Kecepatan dasar: Kecepatan maksimum yang dapat dicapai motor pada tegangan pengenal (ketika EMF belakang dekat dengan tegangan bus)
Titik awal kontrol magnetik yang lemah.
4. Konstanta EMF Kembali:
Definisi: Besarnya EMF belakang (biasanya mengacu pada garis belakang EMF) yang dihasilkan per revolusi oleh motor. Unit adalah V/(krpm) atau vs/°. Metode Pengukuran: Terkait langsung dengan tautan fluks magnet permanen ψpm (ke = ψpm × w). Digunakan untuk memperkirakan kembali EMF pada kecepatan rotasi apa pun (E = ke × N), yang sangat penting untuk menentukan tegangan bus minimum yang dibutuhkan oleh drive, mencegah overmodulasi, dan menerapkan kontrol magnet yang lemah. Diukur melalui pengujian back-drive tanpa beban.
5. Torsi Konstanta:
Artinya: Besarnya torsi yang dihasilkan oleh motor per unit arus (untuk SPMSM, kira -kira kt ≈ (3/2)*p*ψpm). Unit ini adalah nm/a.
Referensi: Digunakan untuk memperkirakan perintah arus sumbu Q yang diperlukan untuk perintah torsi yang diberikan (lq_ref = t_ref / kt). Perhatikan bahwa untuk IPMSM, KT tidak konstan karena adanya torsi magnetoresistance dan bervariasi dengan ID.
6. Konstanta Waktu Listrik:
Artinya: Biasanya mengacu pada konstanta waktu listrik dari loop saat ini, t_e = l / r (l biasanya dianggap sebagai LQ atau rata -rata, R adalah resistansi fase)
Cara Melihat: Ini adalah parameter kunci dari pengontrol loop arus desain (biasanya regulator PI), yang menentukan kecepatan respons loop saat ini.
7. Konstanta Waktu Mekanik:
Artinya: Mempertimbangkan konstanta waktu motor dan beban inersia, gesekan dan faktor lainnya, tm = j *r/(kt *ke) (j adalah inersia total)
Cara melihat: kecepatan respons cincin kecepatan adalah referensi penting untuk desain pengontrol cincin kecepatan
8. Momen inersia :
Artinya: Momen inersia rotor motor itu sendiri. Unit adalah kg · m? Cara Membaca: Ini mempengaruhi kemampuan akselerasi/perlambatan motor, respons dinamis dari loop kecepatan, dan sensitivitas terhadap gangguan memuat. Sistem servo memiliki persyaratan untuk mencocokkan momen inersia.
9. Arus maksimum:
Artinya: Arus jangka pendek maksimum (arus puncak) diizinkan oleh motor atau driver. Biasanya jauh lebih besar dari arus pengenal.
Cara melihat: Menentukan kapasitas kelebihan jangka pendek (torsi puncak) motor. Ini dibatasi oleh faktor -faktor seperti pemanasan belitan, risiko demagnetisasi magnet permanen, dan batas arus pengemudi.
10. Rotasi Inersia :
Artinya: Momen inersia rotor motor itu sendiri. Unit adalah kg · m?
Cara melihatnya: Ini mempengaruhi kemampuan akselerasi/perlambatan motor, respons dinamis dari cincin kecepatan, dan sensitivitas terhadap gangguan memuat. Sistem servo memiliki persyaratan untuk pencocokan inersia rotasi.
11. Kecepatan maksimum:
Artinya: Kecepatan maksimum yang dapat dicapai oleh motor F di bawah persyaratan kekuatan mekanik, masa pakai yang mengandung, getaran dan kebisingan. Biasanya jauh lebih tinggi dari kecepatan pengenal.
Cara melihat: Menentukan rentang kecepatan operasi motor. Pada kecepatan tertinggi, kontrol magnetik yang lemah biasanya diperlukan untuk mempertahankan output torsi.
Bagaimana Anda melihat parameter ini
1. Tujuan yang jelas:
Seleksi dan pencocokan: Fokus pada parameter papan nama (daya, tegangan, kecepatan, torsi, perlindungan, pendinginan) untuk memastikan bahwa persyaratan beban, kondisi lingkungan dan persyaratan catu daya dipenuhi. Fokus pada efisiensi (biaya operasi jangka panjang)
Konfigurasi dan kontrol drive: Selain parameter papan nama, parameter desain (R, LD, LQ, ψpm) harus diperoleh sebagai dasar untuk mencapai kontrol vektor kinerja tinggi (misalnya, F0C). Parameter pengontrol (Gain PI, atau KE/KT) dan parameter pengamat perlu ditetapkan sesuai dengan parameter ini.
Analisis dan simulasi kinerja: Satu set lengkap parameter sirkuit ekivalen (R, LD, LQ, ψpm, Y, koefisien gesekan, dll.) Diperlukan untuk membangun model matematika yang akurat.
Diagnosis Kesalahan: Perubahan parameter (seperti peningkatan resistensi dapat mengindikasikan overheating belitan, dan perubahan induktansi dapat mengindikasikan sirkuit pendek antar-turn atau demagnetisasi) dapat digunakan sebagai dasar diagnostik.
2. Perhatikan hubungan antara parameter:
Kekuatan, kecepatan, torsi: p = t*w
Tegangan, EMF punggung, arus, induktansi: v ≈ e + ir + jwli (hubungan vektor)
Torsi, fluks magnetik, arus: t = (3/2)* p* [ψ ±* lq + (ld-lq)* ld* lq] kecepatan, frekuensi, logaritma kutub: n_sync = 60f/p belakang gaya elektromotif dan fluks magnet: ke∝ ψ ±
3. Memahami sifat bersyarat parameter:
Banyak parameter (khususnya parameter desain R, LD, dan LQ) bukan konstanta - mereka bervariasi dengan suhu, arus (saturasi magnetik), dan posisi rotor (efek alur gigi). Kontrol kinerja tinggi harus menjelaskan faktor-faktor nonlinier ini. Spesifikasi pada papan nama peralatan didefinisikan dalam kondisi spesifik (tegangan pengenal, frekuensi, beban, pendinginan, dan suhu). Ketika kondisi operasi aktual berbeda dari skenario ideal ini, kinerja dapat menyimpang dari titik pengenal.
4. Cari Dokumen Resmi:
Spesifikasi motor dirinci dalam papan nama peralatan dan tabel spesifikasi kinerja dalam manual produk. Parameter desain kritis (R, LD, LQ, ψpm, KE, KT) biasanya disediakan dalam "parameter teknis", "parameter sirkuit yang setara", atau bagian "parameter kontrol" dari manual. Jika tidak tersedia, dokumentasi pabrikan harus diperoleh. Parameter terperinci seperti kurva induktansi pada tingkat saturasi yang berbeda mungkin memerlukan dokumen desain khusus atau laporan pengujian.
5. Pengukuran Uji :
Jika parameter resmi tidak dapat diperoleh, pengukuran eksperimental (seperti uji blok, uji drag tanpa beban, pengukuran meter LCR, diperlukan algoritma identifikasi parameter, dll.) Namun, ini membutuhkan peralatan dan pengetahuan profesional.