








News















Motor Kawat Datar vs Motor Jepit Rambut: Apa Bedanya & Mana yang Lebih Baik untuk Kendaraan Listrik?
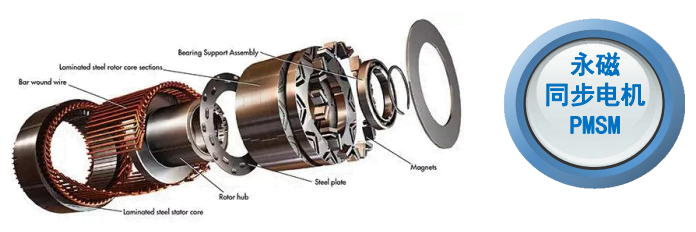


















Mengapa PMSM Digunakan pada Kendaraan Listrik? Panduan Definitif Motor Sinkron Magnet Permanen di EV









Prinsip kerja dan tata letak klasifikasi sistem penggerak listrik kendaraan listrik
Kendaraan listrik memiliki keunggulan efisiensi tinggi, emisi nol, keramahan lingkungan, dan keadaan kontrol tidak akan terpengaruh oleh dunia luar, dan bagian mereka juga meningkat. Kendaraan komersial listrik juga muncul dalam proses ini. Perbedaan utama antara kendaraan listrik dan kendaraan modern tradisional adalah bahwa mode penggerak kendaraan listrik telah diubah menjadi penggerak listrik. Sistem penggerak listrik terutama dibagi menjadi empat bagian: motor penggerak, transmisi, konverter daya dan pengontrol. Sistem penggerak listrik adalah inti dari seluruh kendaraan energi baru, yang secara langsung mempengaruhi ekonomi, keamanan, keandalan, dan kinerja lainnya.
1. Pengantar sistem penggerak listrik
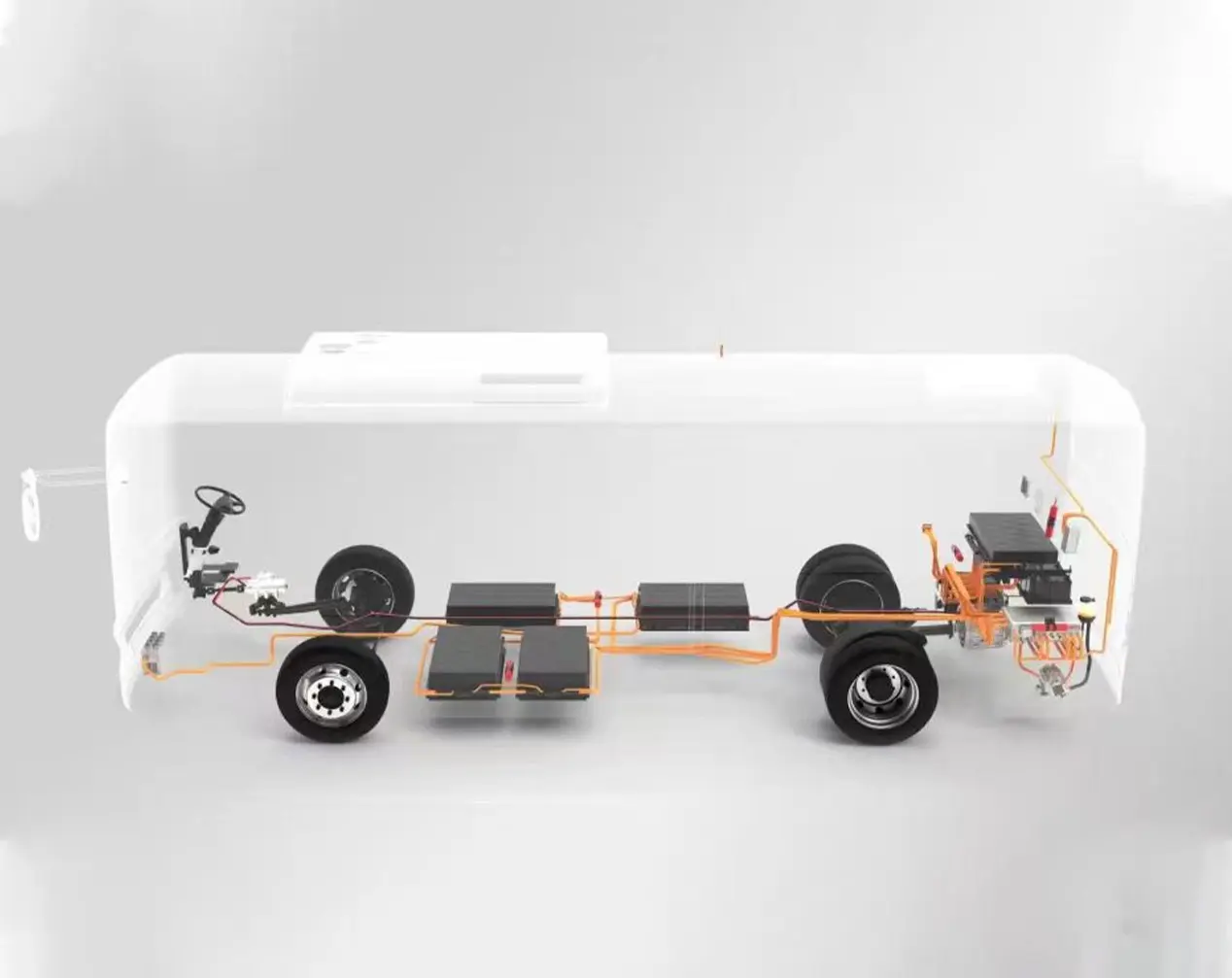
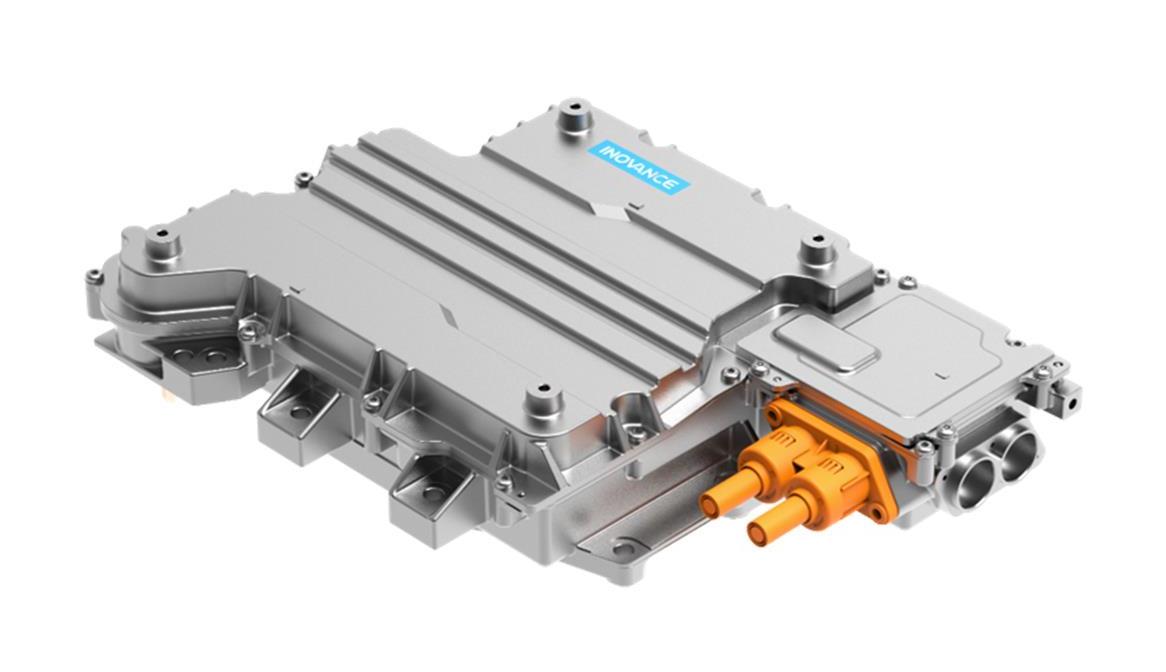
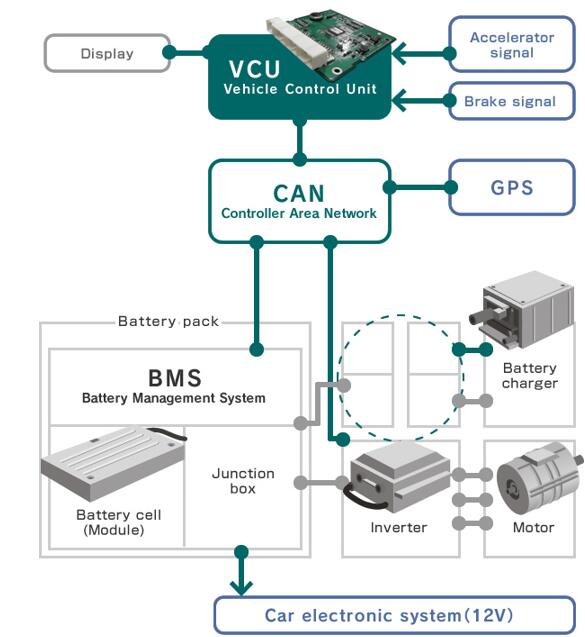
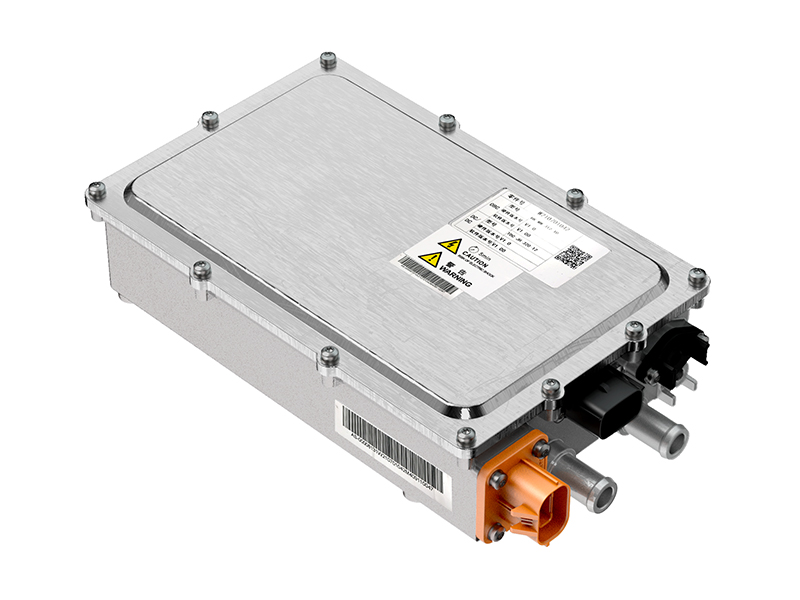
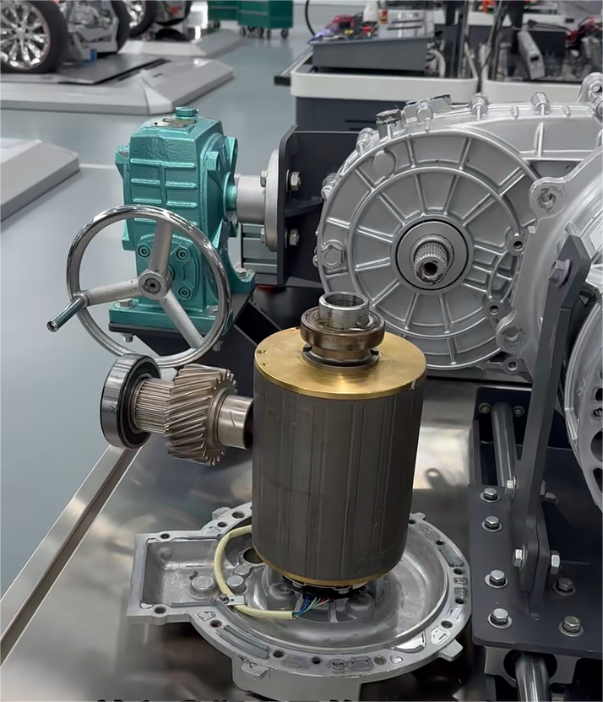
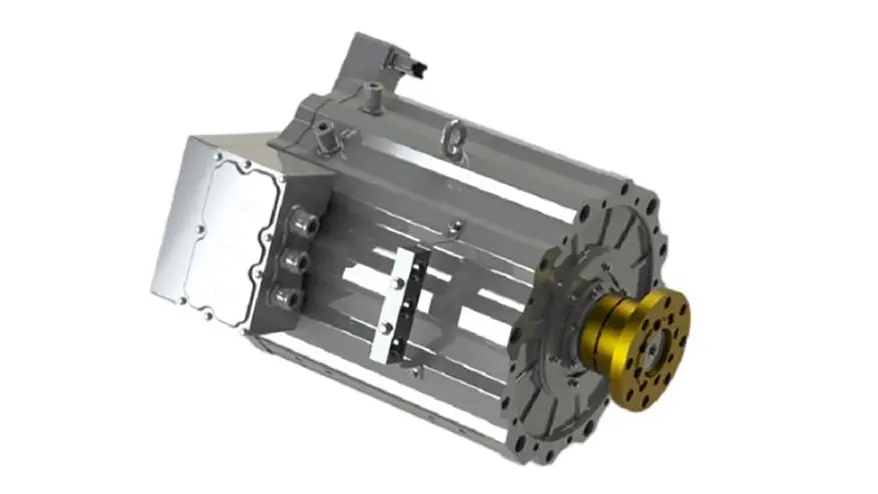
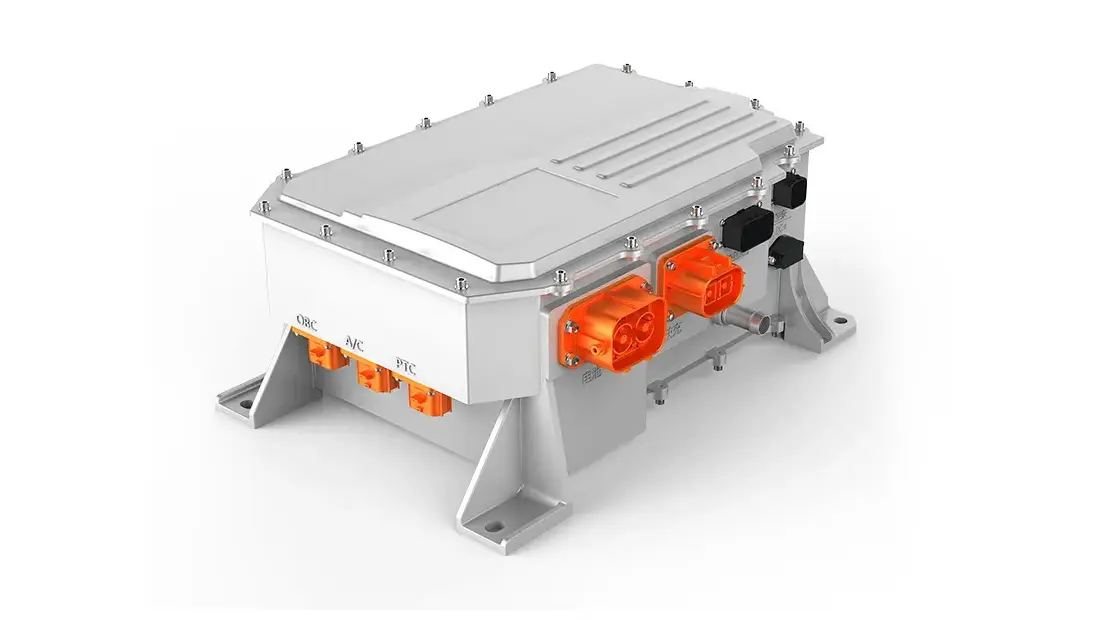
Struktur kendaraan energi baru terutama terdiri dari sistem penggerak listrik, bagian sasis, struktur tubuh dan berbagai perangkat tambahan terkait. Kecuali untuk sistem penggerak listrik, fungsi dan komposisi struktural dari bagian -bagian lainnya umumnya mirip dengan mobil konvensional, tetapi beberapa bagian telah disederhanakan, dimodifikasi atau diganti karena berbagai metode drive yang dipilih. Komposisi dan prinsip kerja sistem penggerak listrik ditunjukkan pada Gambar 1, yang dapat dibagi menjadi tiga bagian: modul tambahan, modul catu daya on-board, dan modul utama penggerak listrik.
2. Klasifikasi tata letak dan karakteristik sistem penggerak listrik
- Unit penggerak listrik pusat, seperti yang ditunjukkan pada gambar, mengintegrasikan motor penggerak dengan gearbox, mengganti mesin dan gearbox konvensional, tetapi masih membutuhkan driveshaft serta gandar konvensional. Dalam hal pengaturan, ini mirip dengan powertrain otomotif tradisional. Selain itu, rute transmisi panjang, kehilangan energi besar, dan efisiensi sistemnya rendah; Ruang bawah ditempati dalam jumlah besar, yang membuatnya sulit untuk mengatur baterai daya. Sebagai contoh, rakitan penggerak listrik pusat dari tipe Cetrax yang diproduksi oleh ZF Friedrichshafen AG di Jerman, seperti yang ditunjukkan pada Gambar 3, cocok untuk bus bertingkat rendah dan bertingkat tinggi. Berdasarkan pendekatan desain "plug-and-drive", Cetrax dapat diintegrasikan ke dalam platform kendaraan saat ini tanpa perubahan besar pada sasis, as roda depan dan belakang atau diferensial. Output maksimum dan torsi puncak masing -masing adalah 300 kW dan 4 400 nm.
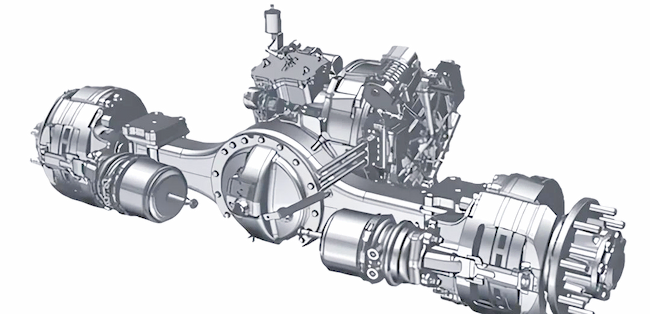
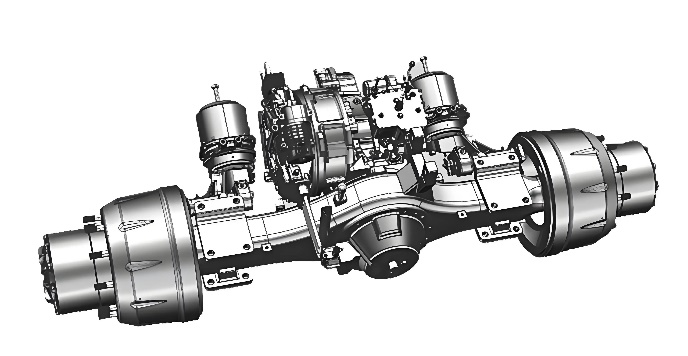
- Transael listrik terintegrasi (sumbu paralel/koaksial/vertikal) ditunjukkan dalam diagram dan mengintegrasikan transaxle konvensional dengan motor listrik, yang melambat dan meningkat secara torsional dan digunakan secara langsung untuk menggerakkan roda. Ini menghemat poros transmisi sebelumnya, braket suspensi dan bagian lain, yang membuat biaya pemuatan rendah; Efisiensi transmisi yang tinggi; Ini menempati lebih sedikit ruang dan lebih nyaman untuk tata letak paket baterai daya; dan kurang efektif dalam hal NVH; Massa yang tidak tertutup besar dan offset, dan kemampuan manuver seluruh kendaraan tidak tinggi. Sebagai contoh, gandar penggerak terintegrasi dua kecepatan dari model QT130Spe yang diproduksi oleh Qingte Group Co., Ltd., seperti yang ditunjukkan pada Gambar 5, cocok untuk traktor 49T dengan beban terukur 13 t. Skema shift tepi magnetik ganda membuat geser gigi bergeser halus dan pengalaman berkendara lebih menyenangkan. Integrasi sistem tradisional secara efektif melepaskan ruang sasis dan memberikan penumpu yang lebih baik.

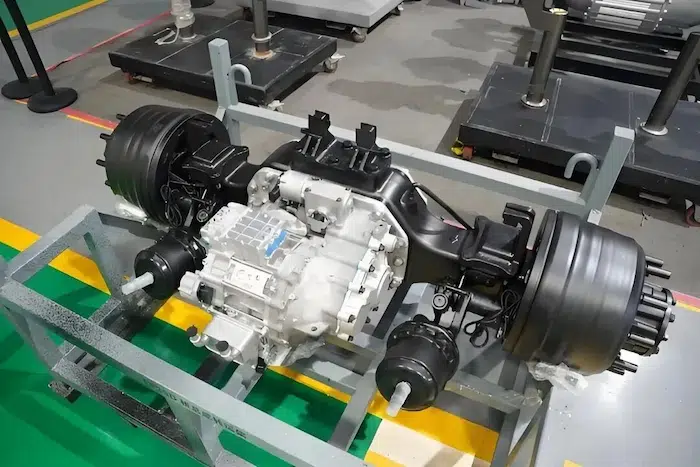
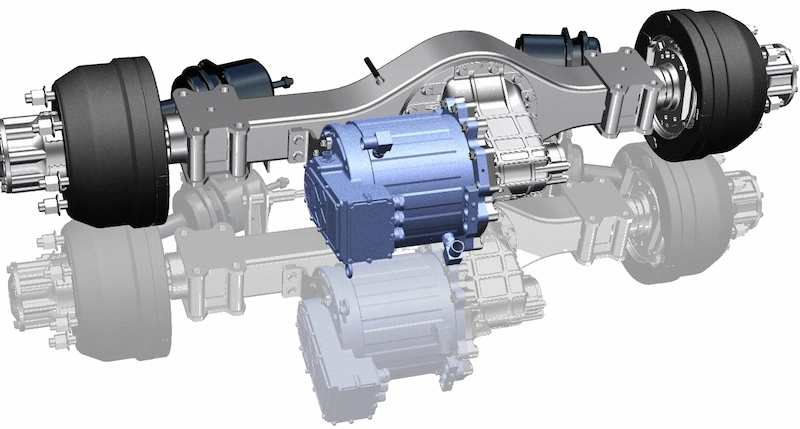
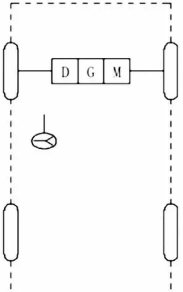
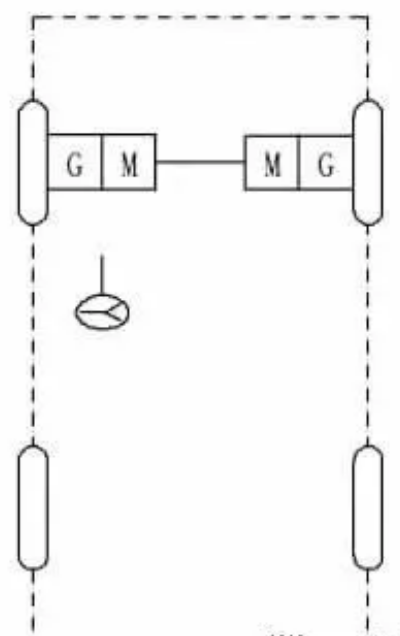
- Seperti yang ditunjukkan pada gambar, motor yang sangat terintegrasi, peredam dan gandar drive tradisional membatalkan poros transmisi dan diferensial, dan efisiensi transmisi tinggi karena mengadopsi transmisi diferensial elektronik; Dan itu menempati lebih sedikit ruang, dan tata letak baterai daya lebih nyaman; Namun, massa yang tidak tertutup besar, yang tidak baik untuk penanganan seluruh kendaraan, dan kontrol diferensial elektronik sulit. Seperti yang ditunjukkan pada Gambar 7, jenis motor mengadopsi motor asinkron, yang diterapkan pada 10 m ~ 18 m bus, daya maksimum adalah 2 × 125 kW, massa beban gandar maksimum adalah 13.000 kg, dan inverter pengontrolnya tidak diintegrasikan pada poros, dengan mekanisme perlambatan dua tahap.
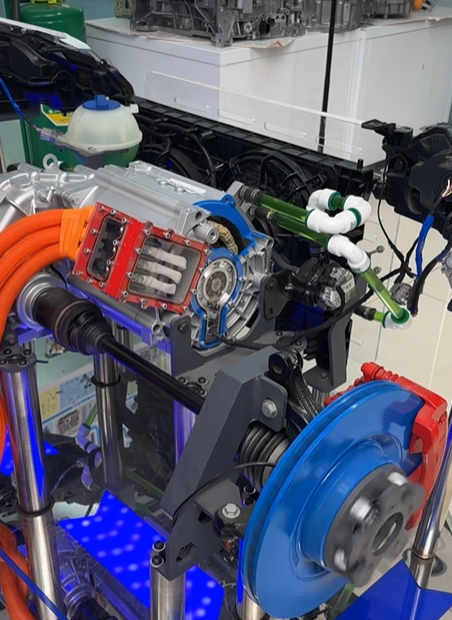
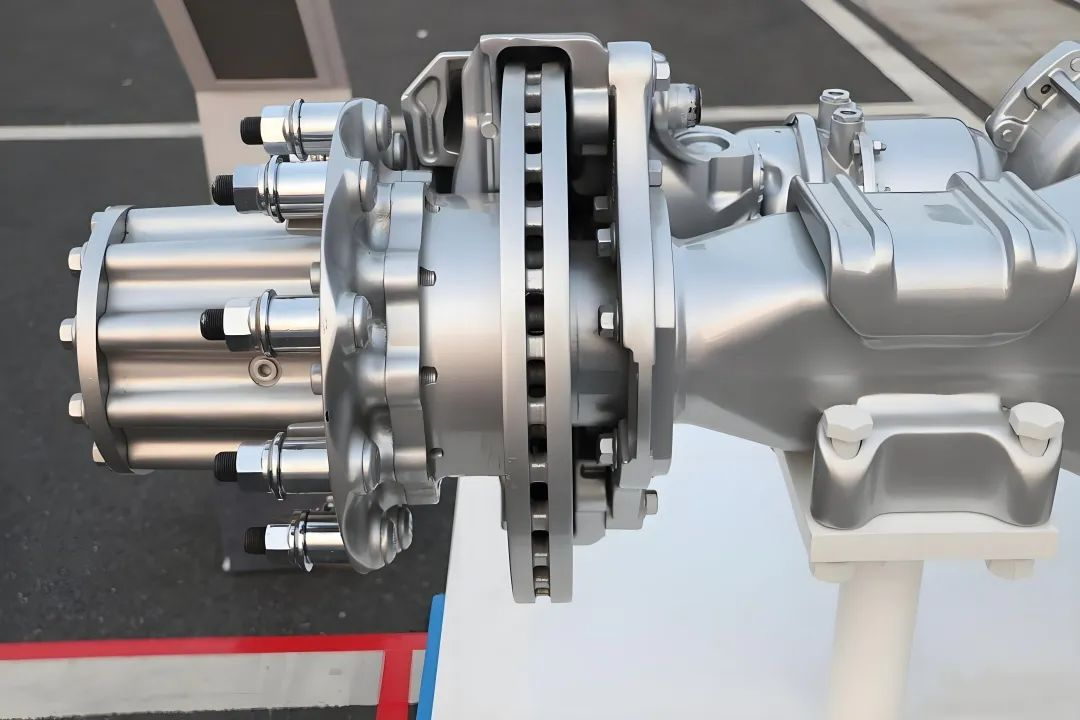
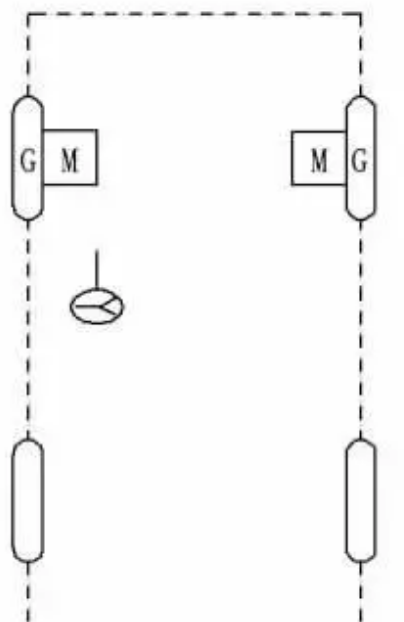
- Seperti yang ditunjukkan pada Gambar 8, bagian motor roda sangat terintegrasi dengangandar driveBagian [1], dan motor penggerak langsung menggerakkan roda adalah arah pengembangan di masa depan. Sistem penggerak ini memiliki efisiensi transmisi tertinggi, dan memiliki keunggulan ringan dan konsumsi energi yang rendah; Efisiensi pemulihan energi pengereman mendekati 100%, tetapi biayanya tinggi. Ketika ukuran motor besar, ada masalah seperti overheating, demagnetisasi, dan sistem rantai industri, dan saat ini, teknologi di daerah ini tidak matang. Misalnya, poros penggerak listrik di roda yang diproduksi oleh perusahaan Belanda E-traksi, seperti yang ditunjukkan pada Gambar 9, memiliki nol emisi, biaya kepemilikan yang rendah, dan efisiensi hingga 94% dari baterai ke roda, yang yang yang 15% lebih tinggi dari sistem penggerak listrik biasa, dan mengurangi bagian yang bergerak. Kisaran meningkat sebesar 20% dan ukuran baterai berkurang 20%. Mudah dipelihara, kebisingan rendah, kenyamanan tinggi dan redundansi tinggi, kontrol roda independen menempati area kecil, pemanfaatan ruang tinggi, dan mode kontrol fleksibel, yang cocok untuk bus dan truk 12 m ~ 18 m, dan memiliki jangkauan yang luas aplikasi.
Saat ini, jenis umum sistem penggerak listrik untuk kendaraan komersial energi baru terutama sistem penggerak listrik terintegrasi pusat, as roda penggerak listrik, dan as roda penggerak listrik terintegrasi. Gandar penggerak listrik koaksial yang terintegrasi secara terpusat digunakan untuk truk tugas sedang dan berat serta truk pembuangan tubuh lebar. Transaxle listrik sisi roda sering digunakan dalam serangkaian bus lebih dari 10 m. Gandar penggerak listrik terintegrasi sering digunakan dalam truk dan seri minibus 6 m ~ 7 m. Gandar penggerak listrik terintegrasi dibagi menjadi tiga bentuk: sumbu paralel, sumbu koaksial dan vertikal. Di antara mereka, motor penggerak poros penggerak listrik yang terintegrasi dengan sumbu vertikal terhubung dan digerakkan oleh gandar penggerak pada sudut tegak lurus, dan mode reduksi gigi hiperboloid diadopsi, rasio kecepatannya kecil, dan kepadatan daya sistem rendah. Poros paralel diintegrasikan dengan gandar penggerak listrik, motor dan gandar penggerak diatur dalam keadaan paralel, dan motornya multi-offset. Sebagian besar transmisi gigi silinder, rasio kecepatan besar, kepadatan daya tinggi; Karena massa dan offset yang tidak tertutup besar, penanganan dan kenyamanan seluruh kendaraan buruk. Gandar penggerak listrik terintegrasi domestik sebagian besar mengadopsi jenis poros paralel.
Dibandingkan dengan sistem drive pusat, gandar penggerak listrik terintegrasi memiliki tingkat integrasi yang tinggi dalam hal motor, peredam, diferensial, dan poros; Desain dan kontrol transmisi otomatis dan teknologi kontrol sistem penggerak listrik sulit; Sasis menempati ruang kecil, dan pengaturan baterai nyaman; Ini dapat mencapai pemulihan energi tinggi, bobot ringan, 10% ~ 25% lebih rendah dari drive pusat, secara efektif mengurangi konsumsi daya, kecepatan motorik tinggi, ukuran kecil, dan kepadatan daya tinggi. Namun, motor dan gearbox berada di bawah suspensi, dan massa yang tidak tertutup besar, yang tidak kondusif untuk peningkatan penanganan dan kenyamanan kendaraan. Sulit untuk mengembangkan desain dan kontrol transmisi otomatis, teknologi kontrol sistem penggerak listrik, dan as roda penggerak kendaraan komersial. Motor dan gearbox dari sistem drive pusat berada di atas suspensi, dan massa yang tidak ditempa kecil, dan penanganan dan kenyamanan kendaraan tinggi. Sulit untuk merancang dan mengontrol transmisi otomatis dan mengembangkan teknologi kontrol untuk sistem penggerak listrik.
Tren pengembangan truk berat energi baru
Dengan pengembangan dan penelitian truk berat energi baru di industri, mengingat faktor-faktor utama seperti ekonomi, integrasi dan keselamatan, dikombinasikan dengan tren pengembangan sistem penggerak listrik di masa depan dengan ringan, berkecepatan tinggi, efisiensi tinggi, keandalan tinggi dan NVH yang baik, tren pengembanganTruk Berat Energi Baruterutama mencakup aspek -aspek berikut.
1) Biaya produksi yang rendah dan biaya perawatan yang rendah. Dalam penggunaan sehari -hari truk berat energi baru, tumpukan pengisian daya, perawatan kendaraan, dan masa pakai baterai membutuhkan sejumlah investasi modal. Untuk memastikan persyaratan ekonomi, pengejaran biaya yang lebih rendah dan biaya pemeliharaan adalah salah satu tujuan utama mempromosikan kendaraan energi baru.
2) Berat badan ringan dan modularitas sistem kontrol elektronik. Semakin besar massanya sendiri, semakin tinggi konsumsi energi baterai selama operasi. Sistem penggerak listrik membutuhkan lebih banyak komponen yang lebih kompleks untuk dikendalikan, dan modularitas adalah cara untuk memecah sistem yang kompleks menjadi modul yang lebih baik. Sementara ringan dan mengoptimalkan strukturnya sendiri, juga perlu untuk memenuhi persyaratan kekuatan dan meningkatkan tingkat pemanfaatan bahan baku. Jadikan berkecepatan tinggi dan kurangi torsi motor; Efisiensi tinggi, mengurangi konsumsi energi seluruh kendaraan.
3) Gelar pendakian yang lebih besar dan kinerja daya yang kuat. Daya yang dapat diberikan oleh sistem penggerak listrik dibatasi oleh faktor -faktor seperti daya motor dan ukuran baterai. Truk tugas berat memiliki massa yang lebih berat dan kapasitas beban yang lebih tinggi, dan seringkali kekurangan daya saat memanjat lereng dan kondisi jalan yang buruk (berlumpur, lubang, dll.).
4) Konsumsi energi yang rendah dan keandalan yang tinggi. Jangkauan jelajah adalah salah satu indikator kinerja penting dari kendaraan energi baru, dan sangat penting dalam pengoperasian truk berat energi baru. Jumlah jarak tempuh yang tersisa dan konsumsi energi di bawah kondisi jalan yang kompleks semuanya mengedepankan persyaratan yang lebih tinggi untuk keandalan. Studi spektrum beban mendalam dilakukan untuk mengidentifikasi komponen yang dapat dikonsumsi dan meningkatkan masa kerja sistem secara keseluruhan. Memperkuat kemampuan analisis simulasi dan verifikasi tes di bawah kondisi kerja yang ekstrem.
5) Pengalaman berkendara yang baik. Gunakan kepadatan daya dan torsi tinggi untuk mencapai akselerasi yang lebih baik, kondisi jalan yang kompleks, menanjak dan menyalip kinerja. Mengoptimalkan NVH dari sistem penggerak listrik itu sendiri, sehingga dapat meningkatkan kualitas NVH dari seluruh kendaraan.
Kesimpulan
Singkatnya, prinsip kerja, klasifikasi dan produk spesifik dari penggerak listrik diperkenalkan, dan skema konfigurasi dan implementasi sistem penggerak listrik pada tahap ini dijelaskan secara singkat. Dengan pengembangan bertahap kendaraan listrik, pembaruan dan iterasi produk kelas bawah telah sangat meningkatkan kinerja, efisiensi transmisi dan jangkauan jelajah, yang telah membuat transmisi multi-kecepatan menjadi tren pengembangan sistem transmisi kendaraan listrik di masa depan. Dalam hal kendaraan listrik dan kendaraan komersial, bentuk utama sistem penggerak listrik adalah as roda gandar penggerak listrik, as roda penggerak listrik terintegrasi dan rakitan penggerak listrik pusat. Mobil penumpang sebagian besar menggunakan as roda gandar penggerak listrik, truk sebagian besar menggunakan as roda penggerak listrik terintegrasi atau rakitan central drive, dan truk berat cocok untuk bentuk as roda penggerak listrik terintegrasi atau rakitan central drive. Setelah perbandingan, untuk memenuhi persyaratan kinerja yang lebih tinggi dan mencapai manfaat ekonomi yang lebih baik, skema sistem penggerak listrik menggunakan konfigurasi keseluruhan motor berkecepatan tinggi dan gearbox multi-kecepatan lebih sesuai dengan tren pengembangan di masa depan.
Baca selengkapnya:Komposisi dan tren pengembangan as roda listrik