








News















Motor Kawat Datar vs Motor Jepit Rambut: Apa Bedanya & Mana yang Lebih Baik untuk Kendaraan Listrik?


















Mengapa PMSM Digunakan pada Kendaraan Listrik? Panduan Definitif Motor Sinkron Magnet Permanen di EV









Peran sistem kontrol kendaraan listrik dalam mengemudi otonom
Ketika industri otomotif berputar ke arah solusi yang berkelanjutan dan otonom, kendaraan listrik (EV) telah muncul sebagai pelopor dalam transformasi ini. Inti dari efektivitas kendaraan ini adalahSistem Kontrol Kendaraan Listrik, yang mengatur tarian rumit antara perangkat keras dan perangkat lunak untuk memastikan kinerja, keamanan, dan pengalaman pengguna yang optimal. Blog ini menggali peran penting dari sistem kontrol kendaraan listrik dalam mengemudi otonom, mengeksplorasi bagaimana mereka mengintegrasikan berbagai teknologi dan apa artinya ini bagi masa depan transportasi.
Memahami Sistem Kontrol Kendaraan Listrik
Sistem kontrol kendaraan listrik mencakup berbagai teknologi yang mengelola operasi kendaraan. Di jantung sistem ini adalah pengontrol mobil listrik, yang bertindak sebagai otak EV, memproses data dari berbagai sensor dan mengeksekusi perintah untuk mengoptimalkan kinerja. Dalam kendaraan listrik yang otonom, pengontrol mobil listrik memainkan peran penting dengan memproses data dari beberapa sensor untuk membuat keputusan mengemudi secara instan.
Komponen kunci dari sistem kontrol EV
Fungsionalitas sistem kontrol kendaraan listrik bergantung pada beberapa komponen utama, masing -masing memainkan peran penting dalam operasi keseluruhan kendaraan. Memahami komponen -komponen ini dapat menerangi bagaimana mereka bekerja bersama untuk memungkinkan kemampuan mengemudi yang otonom.
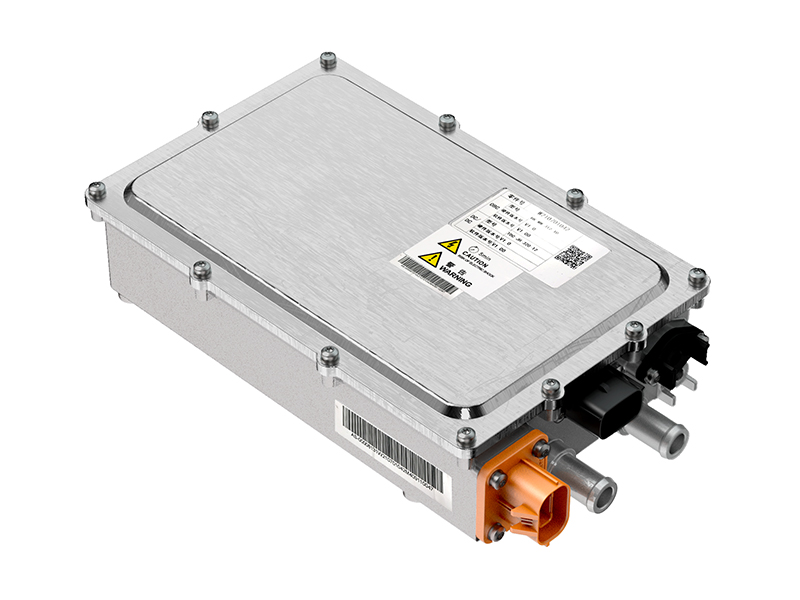
Power Electronics:Elektronik daya mengacu pada teknologi yang berkaitan dengan konversi, kontrol, dan manajemen tenaga listrik menggunakan perangkat elektronik. Dalam konteks sistem kontrol kendaraan listrik (EV), elektronik daya memainkan peran penting dalam mengonversi dan mengendalikan energi listrik secara efisien dari baterai untuk menggerakkan motor listrik, mengelola sistem tambahan, dan mengoptimalkan kinerja kendaraan secara keseluruhan.
Ini terdiri dari komponen utama berikut:
- Sumber Daya - Memberikan daya input yang bisa AC atau DC.
- Power Electronic Converter - Bertindak sebagai jantung sistem dan berisi sakelar semikonduktor yang secara efisien mengonversi dan memproses daya input.
- Load - mengkonsumsi daya output yang dikonversi dan dapat menjadi perangkat seperti motor, baterai dll.
- Sensor - Berikan umpan balik tentang kondisi beban seperti arus, tegangan dll.
- Controller - Monitor umpan balik, membandingkannya dengan referensi dan kontrol sakelar konverter yang sesuai.
Sensor:Ini termasuk berbagai perangkat seperti lidar, kamera, dan radar, yang menyediakan data waktu nyata tentang lingkungan kendaraan, membantunya menavigasi dengan aman. Lidar menggunakan balok laser untuk membuat peta 3D di sekitarnya, sementara kamera menangkap informasi visual yang dapat diproses untuk mengidentifikasi hambatan, tanda jalur, dan rambu lalu lintas. Sistem radar, di sisi lain, sangat baik untuk mendeteksi benda pada jarak jauh dan dalam berbagai kondisi cuaca, melengkapi data yang disediakan oleh sensor lain. Bersama -sama, sensor -sensor ini membentuk sistem persepsi komprehensif yang memungkinkan kendaraan untuk memahami lingkungannya.
Algoritma Perangkat Lunak:Algoritma canggih menganalisis data dari sensor dan menjalankan perintah kontrol, memungkinkan fitur seperti kontrol pelayaran adaptif, bantuan pemeliharaan jalur, dan banyak lagi. Algoritma ini menggunakan kecerdasan buatan dan teknik pembelajaran mesin untuk meningkatkan kinerja mereka dari waktu ke waktu. Dengan belajar dari pengalaman masa lalu dan data dunia nyata, sistem kontrol dapat memperbaiki proses pengambilan keputusannya, menghasilkan respons kendaraan yang lebih akurat dan andal.
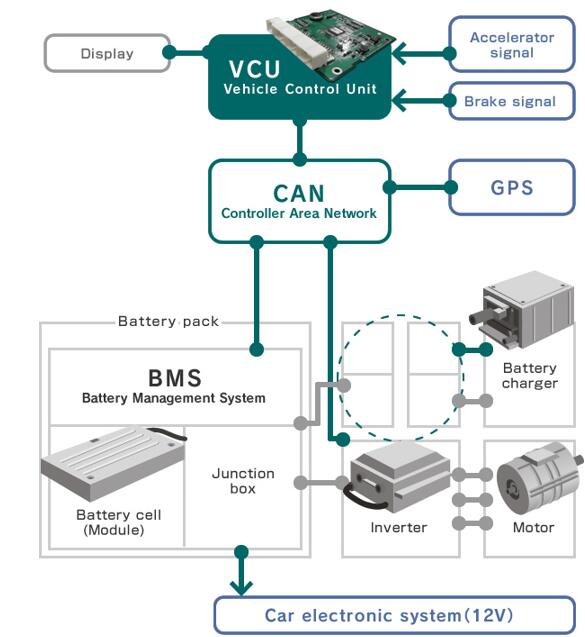
Antarmuka komunikasi:Antarmuka ini memungkinkan sistem kontrol untuk berkomunikasi dengan sistem kendaraan lain dan infrastruktur eksternal, penting untuk fitur seperti kendaraan ke kendaraan (V2V) dan komunikasi kendaraan-ke-infrastruktur (V2I). Komunikasi yang efektif sangat penting untuk memastikan bahwa kendaraan dapat merespons perubahan di lingkungannya secara real time, seperti menyesuaikan kecepatan berdasarkan kendaraan terdekat atau menanggapi perubahan sinyal lalu lintas.
Jenis utama antarmuka komunikasi:
1.Jaringan Area Pengontrol (CAN)
2.Jaringan Area Lokal (LAN)
3.Flexray
4.Jaringan Area Pengontrol dengan Laju Data Fleksibel (Can FD)
5.Ethernet
6.Bluetooth
7.Wi-Fi
8.Zigbee dan protokol daya rendah lainnya
9.Komunikasi kendaraan-ke-kendaraan (V2V) dan kendaraan-ke-infrastruktur (V2I)

Pentingnya sistem kontrol EV dalam mengemudi otonom
1. Pengambilan keputusan real-time
Agar kendaraan listrik bernavigasi secara mandiri, itu harus membuat keputusan sepersekian detik berdasarkan segudang faktor. Sistem kontrol EV dirancang untuk memproses input dari berbagai sensor dan menghitung tindakan terbaik secara real time. Kemampuan ini sangat penting untuk fungsi seperti:
- Deteksi Hambatan:Mengidentifikasi dan menanggapi pejalan kaki, pengendara sepeda, dan kendaraan lain di sekitarnya sangat penting untuk keselamatan. Sistem kontrol menganalisis data sensor untuk mengenali objek dan menilai jarak, kecepatan, dan lintasannya, memungkinkan kendaraan bereaksi dengan tepat, apakah itu berarti berhenti, memperlambat, atau mengubah jalur.
- Manajemen Lalu Lintas:Kemampuan untuk menyesuaikan kecepatan dan arah berdasarkan kondisi lalu lintas, seperti tanda berhenti, lampu lalu lintas, dan kendaraan lain, sangat penting untuk navigasi yang mulus. Sistem kontrol menggunakan algoritma prediktif untuk mengantisipasi arus lalu lintas dan membuat keputusan yang tepat, meningkatkan tidak hanya keamanan kendaraan tetapi juga efisiensi sistem lalu lintas secara keseluruhan.
2. Fitur Keselamatan yang Ditingkatkan
Integrasi fitur keselamatan canggih adalah salah satu keuntungan paling signifikan dari sistem kontrol kendaraan listrik. Sistem kontrol kendaraan listrik menggunakan algoritma prediktif untuk mengantisipasi potensi bahaya dan merespons secara proaktif. Beberapa fitur keamanan utama meliputi:
- Pengereman Darurat Otomatis (AEB):Fitur ini menggunakan data dari sensor untuk mendeteksi tabrakan yang sudah dekat dan menerapkan rem secara mandiri jika perlu. Sistem kontrol terus memantau lingkungan kendaraan, memungkinkannya bereaksi lebih cepat daripada pengemudi manusia dalam situasi kritis.
- Peringatan dan bantuan keberangkatan jalur:Sistem kontrol memantau tanda jalur dan mengingatkan pengemudi atau mengambil tindakan korektif jika kendaraan melayang keluar dari jalurnya. Dengan memberikan peringatan visual dan pendengaran, atau bahkan input pengarah, sistem ini membantu mencegah kecelakaan yang disebabkan oleh kurangnya perhatian atau kelelahan pengemudi.
- Adaptive Cruise Control (ACC):Fitur ini menyesuaikan kecepatan kendaraan untuk mempertahankan jarak berikut yang aman dari kendaraan di depan. Dengan terus menganalisis pola lalu lintas dan meresponsnya, sistem kontrol EV memastikan pengalaman berkendara yang lebih halus.
3. Manajemen Energi yang Dioptimalkan
Kendaraan listrik bergantung pada manajemen energi yang efisien untuk memaksimalkan jangkauan dan kinerja. Pengontrol mobil listrik mengoptimalkan distribusi daya di antara berbagai komponen, termasuk motor, baterai, dan sistem pengereman regeneratif. Insinyur terus -menerus bekerja untuk meningkatkan keandalan dan efisiensi pengontrol mobil listrik untuk memperluas jangkauan kendaraan listrik. Ini sangat penting dalam mengemudi otonom, di mana menjaga keseimbangan optimal antara kinerja dan efisiensi energi sangat penting.
- Pengereman Regeneratif:Selama pengereman, sistem kontrol memulihkan energi kinetik dan mengarahkannya kembali ke baterai, memperluas jangkauan kendaraan. Dengan mengelola transisi antara pengereman regeneratif dan gesekan, sistem kontrol memastikan pengalaman berkendara yang mulus sambil memaksimalkan pemulihan energi.
- Manajemen Energi Adaptif:Dengan menganalisis pola dan kondisi mengemudi, sistem dapat menyesuaikan penggunaan daya untuk meningkatkan efisiensi. Misalnya, jika kendaraan mendeteksi bahwa ia berada dalam situasi lalu lintas berhenti-dan-pergi, ia dapat menyesuaikan strategi konsumsi energinya untuk memprioritaskan masa pakai baterai daripada kinerja, memperluas rentang mengemudi.
4. Komunikasi kendaraan-ke-semuanya (V2X)
Masa depan mengemudi secara otonom bergantung pada kemampuan kendaraan untuk berkomunikasi satu sama lain dan dengan infrastruktur di sekitarnya. Sistem kontrol EV memainkan peran penting dalam memfasilitasi komunikasi ini, yang meningkatkan kesadaran situasional dan kemampuan pengambilan keputusan.
- Prediksi Sinyal Lalu Lintas:Dengan berkomunikasi dengan sinyal lalu lintas, kendaraan dapat mengantisipasi perubahan dalam status cahaya dan menyesuaikan kecepatan yang sesuai, mengurangi mengemudi stop-and-go. Kemampuan ini tidak hanya meningkatkan efisiensi kendaraan individu tetapi juga dapat berkontribusi pada optimasi arus lalu lintas secara keseluruhan.
- Manuver Koperasi:Kendaraan dapat berbagi informasi tentang niat mereka, memungkinkan arus lalu lintas yang lebih halus dan mengurangi kemungkinan kecelakaan. Misalnya, jika satu kendaraan bermaksud untuk bergabung ke jalur, itu dapat memberi tahu kendaraan terdekat lainnya, memungkinkan mereka untuk menyesuaikan kecepatan dan posisi mereka untuk mengakomodasi manuver dengan aman.
- Pembaruan lalu lintas real-time:Melalui komunikasi V2X, kendaraan dapat menerima pembaruan tentang kondisi lalu lintas, penutupan jalan, dan kecelakaan, memungkinkan mereka untuk mengalihkan rute atau menyesuaikan strategi mengemudi mereka secara proaktif.

Tantangan dalam Menerapkan Sistem Kontrol EV
Terlepas dari kemajuan dalam sistem kontrol kendaraan listrik, beberapa tantangan tetap:
- Keamanan Data:Ketika kendaraan menjadi lebih terhubung, risiko serangan dunia maya meningkat. Memastikan integritas komunikasi antara kendaraan dan infrastruktur adalah yang terpenting. Produsen harus menerapkan langkah -langkah keamanan siber yang kuat untuk melindungi data sensitif dan mencegah akses yang tidak sah ke sistem kendaraan.
- Kepatuhan Pengaturan:Daerah yang berbeda memiliki berbagai peraturan yang mengatur teknologi mengemudi yang otonom, memperumit penyebaran sistem kontrol EV pada skala global. Produsen harus menavigasi lanskap kompleks persyaratan hukum, standar pengujian, dan protokol keselamatan untuk memastikan kepatuhan saat memajukan teknologi mereka.
- Standardisasi Teknologi:Kurangnya protokol standar untuk komunikasi V2X dapat menghambat interoperabilitas di antara berbagai kendaraan dan infrastruktur produsen. Mengembangkan standar di seluruh industri akan sangat penting untuk memungkinkan komunikasi dan kolaborasi yang mulus antara berbagai sistem dan perangkat.
- Penerimaan Publik:Ketika kendaraan otonom menjadi lebih umum, menangani kekhawatiran publik tentang keselamatan, privasi, dan kepercayaan pada teknologi akan sangat penting. Produsen dan pembuat kebijakan harus bekerja sama untuk mendidik konsumen tentang manfaat dan langkah -langkah keamanan yang berlaku untuk mengurangi kekhawatiran di sekitar mengemudi otonom.
Masa depan sistem kontrol kendaraan listrik
Ke depan, peran sistem kontrol kendaraan listrik dalam mengemudi otonom hanya akan tumbuh. Dengan kemajuan berkelanjutan dalam AI, teknologi sensor, dan sistem manajemen daya, kita dapat berharap:
- Kemampuan otonom yang ditingkatkan:Sistem masa depan akan meningkatkan kemampuan untuk menavigasi lingkungan yang kompleks secara mandiri, termasuk daerah perkotaan dengan hambatan yang tidak terduga. Integrasi AI tingkat lanjut akan memungkinkan kendaraan untuk belajar dari pengalaman mereka, meningkatkan proses pengambilan keputusan mereka dari waktu ke waktu.
- Integrasi yang lebih besar dengan kota pintar:Ketika infrastruktur perkotaan menjadi lebih pintar, sistem kontrol kendaraan listrik akan memainkan peran penting dalam mengoptimalkan arus lalu lintas dan mengurangi kemacetan. Dengan berkomunikasi dengan lampu lalu lintas pintar, sistem transportasi umum, dan perangkat yang terhubung lainnya, EV dapat berkontribusi pada lingkungan perkotaan yang lebih efisien dan berkelanjutan.
- Inisiatif Keberlanjutan:Dorongan untuk solusi transportasi yang lebih hijau akan mendorong inovasi dalam sistem kontrol kendaraan listrik, dengan fokus memaksimalkan efisiensi energi dan meminimalkan dampak lingkungan. Penelitian tentang teknologi baterai baru, bahan alternatif, dan proses daur ulang yang ditingkatkan akan mendukung transisi ke industri otomotif yang lebih berkelanjutan.
- Pengalaman Pengguna yang Ditingkatkan:Ketika sistem kontrol EV berkembang, mereka akan semakin fokus pada peningkatan pengalaman pengguna. Ini termasuk fitur -fitur seperti mode mengemudi yang dipersonalisasi, konektivitas yang lebih baik dengan perangkat pintar, dan antarmuka yang lebih intuitif yang memungkinkan driver untuk terlibat dengan teknologi dengan mulus.
Kesimpulan
Sistem Kontrol Kendaraan Listrik adalah kunci dalam pencarian mengemudi otonom. Dengan memungkinkan pengambilan keputusan waktu nyata, meningkatkan keselamatan, mengoptimalkan manajemen energi, dan memfasilitasi komunikasi, sistem ini tidak hanya meningkatkan kinerja kendaraan listrik; Mereka mendefinisikan kembali sifat transportasi. Ketika kami terus berinovasi dan mengatasi tantangan di depan, masa depan kendaraan listrik - dan memang, masa depan mobilitas - akan lebih cerah dan lebih berkelanjutan dari sebelumnya.
Dalam lanskap yang berkembang pesat ini, memahami nuansa sistem kontrol kendaraan listrik sangat penting bagi konsumen dan pemangku kepentingan industri, membuka jalan bagi era transportasi baru yang aman, efisien, dan ramah lingkungan. Integrasi sistem kontrol kendaraan listrik ke dalam kehidupan sehari -hari berjanji untuk merevolusi tidak hanya bagaimana kita mengemudi, tetapi bagaimana kita memandang dan berinteraksi dengan dunia di sekitar kita.